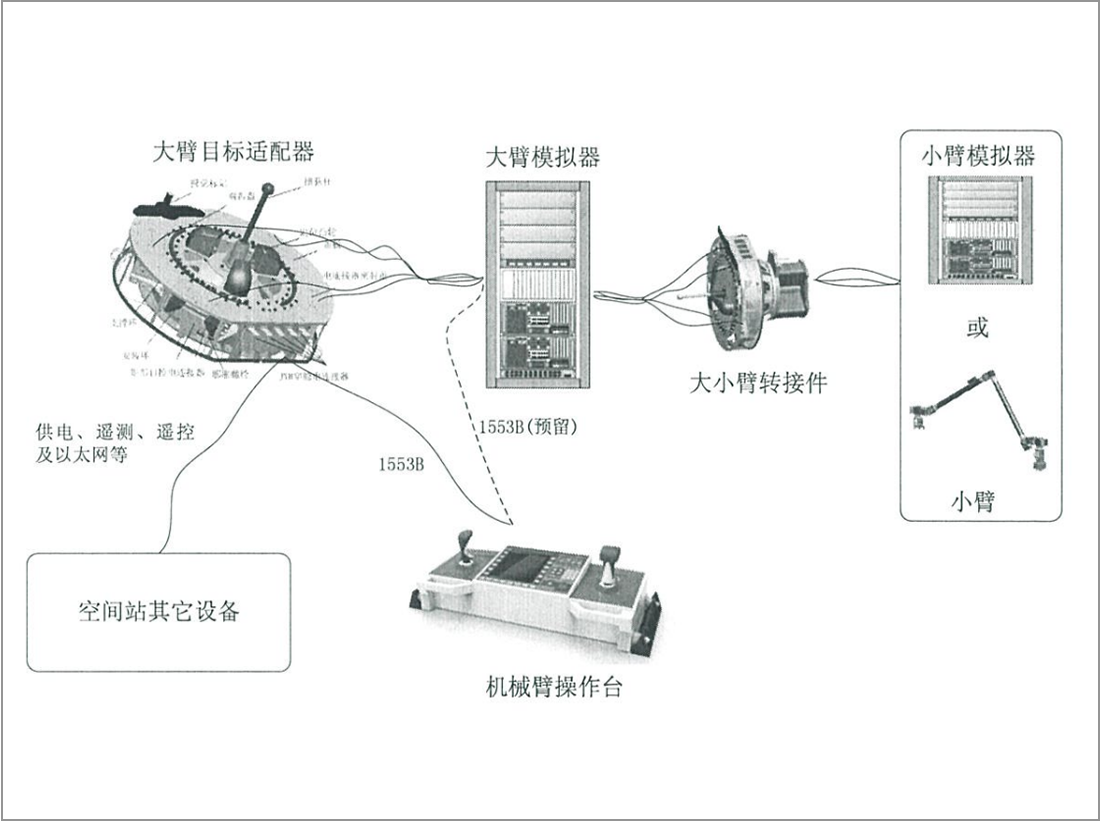
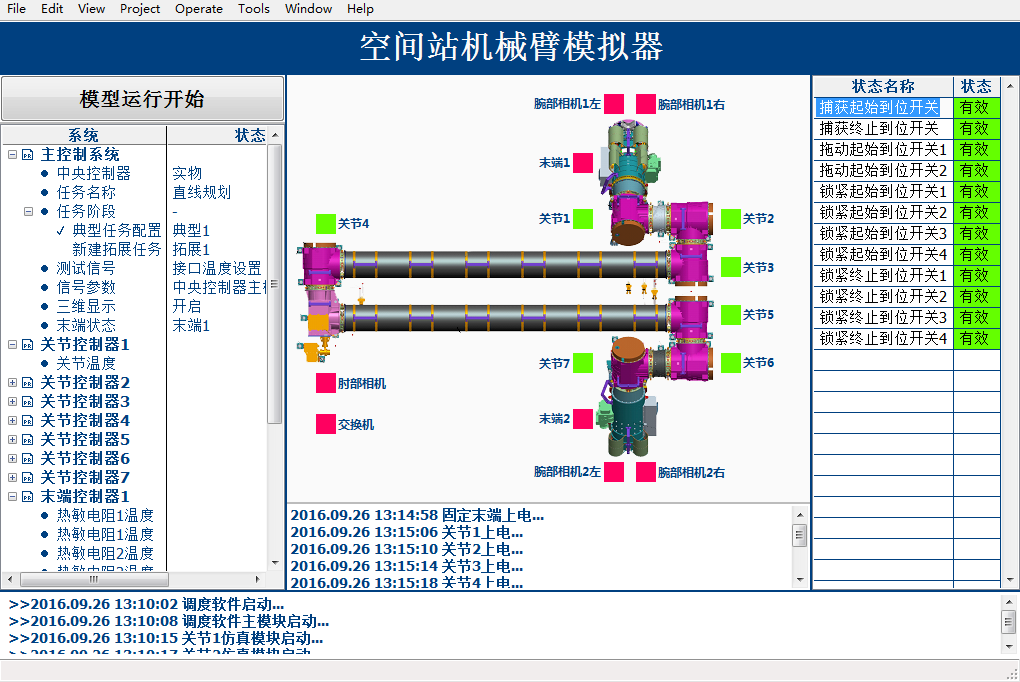
空间站机械臂模拟器用于模拟天合机械臂的对外接口、数据流接口以及动力学仿真,可用于空间站机械臂的测试、半物理验证等等。
机械臂模拟器完成上关节控制器、末端控制器、肘部相机、腕部相机、以太网交换机和机械臂操作台的硬件接口和动力学仿真数据,配合大臂中控,关节控制器、末端控制器等正样状态产品实现硬件在环半实物仿真测试,完成大臂部分产品在整臂各组件联合工作下的测试。
模拟器支持两种模式:
模式一:中央控制器实物在线;
此种模式下,中央控制器采用1553B接口接入模拟器系统,为模拟器运行提供相关的数据输入和输出。模拟器需为中央控制器提供供电接口、指令接口和1553B总线接口,并模拟与中央控制器的间的1553B总线通信协议。
模式二:中央控制器软件实现;
此种模式下,中央控制器采用软件模拟实现,软件要实现中央控制器的算法、逻辑等功能,还需实现中央控制器的通信功能。
空间站机械臂模拟器用于模拟天合机械臂的对外接口、数据流接口以及动力学仿真,可用于空间站机械臂的测试、半物理验证等等。
机械臂模拟器完成上关节控制器、末端控制器、肘部相机、腕部相机、以太网交换机和机械臂操作台的硬件接口和动力学仿真数据,配合大臂中控,关节控制器、末端控制器等正样状态产品实现硬件在环半实物仿真测试,完成大臂部分产品在整臂各组件联合工作下的测试。
模拟器支持两种模式:
模式一:中央控制器实物在线;
此种模式下,中央控制器采用1553B接口接入模拟器系统,为模拟器运行提供相关的数据输入和输出。模拟器需为中央控制器提供供电接口、指令接口和1553B总线接口,并模拟与中央控制器的间的1553B总线通信协议。
模式二:中央控制器软件实现;
此种模式下,中央控制器采用软件模拟实现,软件要实现中央控制器的算法、逻辑等功能,还需实现中央控制器的通信功能。




